CLI 集成开发工具
概述
本章介绍基于 CLI 环境的集成开发工具 ameba.py,以及如何使用该工具进行开发。
ameba.py 封装了常用的开发功能。通过该工具,用户可以方便地进行工程创建、配置、编译等操作。
其中封装的工具主要有:
tools/scripts/build.py,提供编译功能,通过ameba.py build命令调用。用户可通过ameba.py build -h命令查询支持的参数。
tools/scripts/menuconfig.py,提供配置功能,通过ameba.py menuconfig命令调用。用户可通过ameba.py menuconfig -h命令查询支持的参数。
tools/scripts/jlink_script/jlink.py,提供 J-Link 调试功能,通过ameba.py jlink命令调用。用户可通过ameba.py jlink -h命令查询支持的参数。
ameba.py 支持对 SDK 中的所有 Ameba 系列芯片进行开发。在开始首次编译之前,必须先选定一个芯片,例如 RTLxxx。
如果在当前目录下已选择过 SOC,一般无需再次选择。后续的配置、编译等操作均基于该芯片进行。
开始编译或配置后,会在当前目录下自动生成 build_RTLxxx 目录,其中 RTLxxx 为当前选定的芯片型号。该目录下存放编译产物( 固件文件和 build 文件夹)和配置产物( menuconfig 文件夹)。
下面将介绍以下几个部分的内容:
开发流程
Step 1: 环境配置
在终端中执行以下命令:
source {sdk}/env.sh
{sdk}\env.bat
环境配置成功后,终端将输出以下信息:
PIP CHECK... All packages are installed correctly!
================================================================================
| Setup complete. The Ameba SDK is now ready for use.
| Go to the project root directory and run ameba.py
| Usage: ameba.py [COMMAND] [ARGS]
| Build: ameba.py build
| Select SoC: ameba.py soc
| Help: ameba.py help
================================================================================
备注
将
{sdk}替换为用户自己的 Ameba SDK 路径。每次新打开终端都要重新执行以上命令配置环境。因为如果将该脚本放到 bashrc 中,会在每个终端中都配置 Ameba 环境,影响用户原有的软件环境,因此建议用户在每个终端中进行手动配置。
Step 2: 选择一个 SOC
进入目标目录(例如, /home/demo/test ),完成环境配置后,执行以下命令:
ameba.py soc [RTLxxx]
选择后该 SOC 会被记录在当前目录下的 soc_info.json 文件中。
例如,指定 RTL8713E:
$ ameba.py soc RTL8713E
Current SoC is set to: RTL8713E. Saved as /home/demo/test/soc_info.json
若不指定芯片,则会进入交互式选择界面。例如:
$ ameba.py soc
Available SoCs:
----------------------------------------
1. RTL8713E
2. RTL8720E
3. RTL8721Dx
4. RTL8721F
5. RTL8726E
6. RTL8730E
----------------------------------------
Enter an SoC number (1-6): 1
Current SoC is set to: RTL8713E. Saved as /home/demo/test/soc_info.json
备注
可使用
ameba.py list查询所有可用芯片。选择后可使用
ameba.py show查看当前芯片。支持在同一目录下编译多个芯片,每个芯片都有一个专属的
build_RTLxxx文件夹存放编译、配置产物。但由于一个目录下的soc_info.json文件只能保存一个芯片的信息,请在编译前通过ameba.py show确认当前芯片型号,以防结果不符合预期。
Step 3: 配置
如果用户无需修改配置,可跳过此步骤,将使用 Ameba SDK 默认配置进行编译。
如需修改当前 SOC 的配置,可使用以下命令:
ameba.py menuconfig [args]
[args] 部分可选,表示传递给底层 tools/scripts/menuconfig.py 脚本的参数,可通过 ameba.py menuconfig -h 命令查看支持的参数,或查阅 配置工程(menuconfig) 一节。
配置内容会保存在 build_RTLxxx/menuconfig 目录中。
例如,在 /home/demo/test 目录下执行 ameba.py menuconfig ,进入图形化界面修改配置。
由于在前面的步骤中,已当前芯片设置为 RTL8713E ,此处将对 RTL8713E 进行配置:
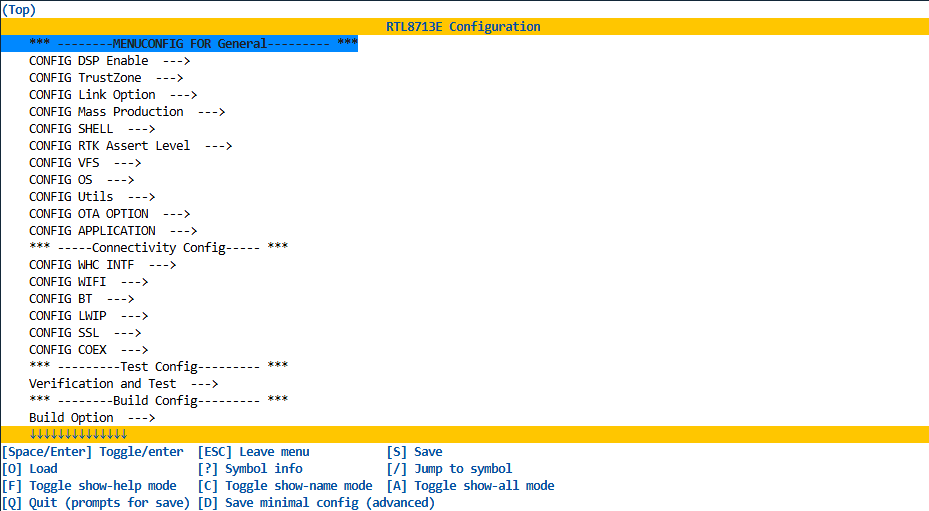
配置成功保存后,终端将输出以下信息:
$ ameba.py menuconfig
Start to menuconfig RTL8713E ...
Loaded configuration '/home/demo/test/build_RTL8713E/menuconfig/.config'
Configuration saved to '/home/demo/test/build_RTL8713E/menuconfig/.config'
将在当前目录下生成 build_RTL8713E/menuconfig 目录,如图所示:

Step 4: 编译
使用以下命令编译当前 SOC:
ameba.py build [args]
[args] 部分可选,表示传递给底层 tools/scripts/build.py 脚本的参数,可通过 ameba.py build -h 命令查看支持的参数,或查阅 编译指令 一节。
编译的中间产物位于 build_RTLxxx/build 目录,最终固件位于 build_RTLxxx 目录。
例如,在 /home/demo/test 目录下执行 ameba.py build 。由于在前面的步骤中,已当前芯片设置为 RTL8713E ,此处将对 RTL8713E 进行编译。
编译成功后将输出以下信息:
$ ameba.py build
Start to build RTL8713E ...
ccache found
Default toolchain path: /opt/rtk-toolchain
Toolchain Version Matched
......
-- Configuring done (1.6s)
-- Generating done (0.3s)
-- Build files have been written to: /home/demo/test/build_RTL8713E/build
[1216/1219] Linking C executable project_km4/make/image1/target_loader_km4.axf
[1219/1219] cd /home/demo/test/build_RTL8713E/build && .../component/soc/amebalite/project/postbuild.cmake
========== Image app generate start ==========
========== Image manipulating end ==========
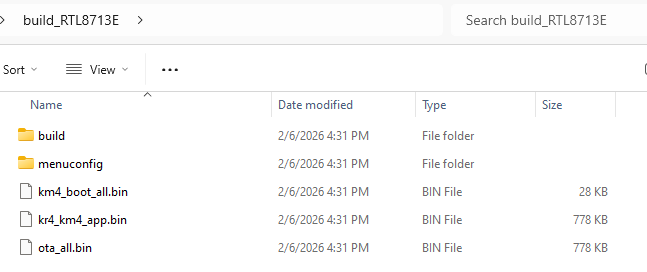
Build done
编译完成后, build_RTL8713E 目录如下图所示:
备注
如需编译其他 SOC,可再次执行
ameba.py soc,然后通过build指令进行编译。也可以直接通过build指令编译指定的 SOC,例如ameba.py build RTL8721Dx。如需清理某个 SOC 的产物,可使用
clean或cleansoc命令,具体用法请参考 常用指令 。
创建外部工程
在一些场景下,用户希望创建独立于 Realtek SDK 的工程目录,方便独立维护或更新,或方便基于同一个 SOC 开发不同的项目。
用户可以基于某个应用示例单独创建一个外部工程,然后在该工程目录中进行开发。
这样,用户可以对自己的应用程序的功能和配置进行扩展,独立维护该工程目录,方便更新 Realtek SDK 中的文件内容。
下文介绍基于外部工程的开发方式。
创建外部工程
首先,按照开发流程的 步骤 1 ,配置好 Ameba SDK 环境。
在终端中执行以下命令:
ameba.py new-project path/to/target [-a app_name]
备注
将
path/to/target替换为新工程的路径,必须要在 SDK 外部,可以是相对路径或绝对路径。-a app_name可选,表示要在新工程中包含的应用示例名称,若不加该参数,将会创建一个空的应用示例。
创建完成后,在指定的路径下会生成一个新的外部工程目录。该目录中包含:
env.batenv.sh:用户可以通过这些脚本配置环境;也可以按照前述的 步骤 1 中的方式配置环境。
<app_name>文件夹:指定的应用示例目录中的文件将被拷贝至相应文件夹;若不指定,将创建app_example文件夹,包含一个空的应用示例
CMakeLists.txt:编译此新建工程的入口文件
Kconfig:在此可添加用户自己的配置项
prj.conf:用于记录该工程的默认配置
例如,在当前目录( /home/demo/test )的同一层级创建一个名为 my_project 的外部工程,并包含 http_client 应用示例。创建成功后,将输出以下信息:
$ ameba.py new-project ../my_project -a http_client
A new project based on app 'http_client' is created in '/home/demo/my_project'.
在外部工程目录中进行开发
进入外部工程目录:
cd path/to/target配置环境:
source env.sh(在 Windows 系统中执行env.bat);也可以按照前述的 步骤 1 中的方式配置环境。使用
ameba.py进行编译、配置等操作,可参考 开发流程的步骤 2 ~ 步骤 4 。
常用指令
ameba.py 用法如下:
ameba.py <command> [args]
其中, <command> 为具体的指令, [args] 为可选参数。
常用指令如下表所示:
功能 |
命令 |
描述 |
|---|---|---|
帮助 |
|
列出支持的命令 |
查询可用芯片 |
|
列出所有可用的芯片型号 |
选择芯片 |
|
设置当前芯片为 RTLxxx |
显示当前芯片 |
|
显示当前的芯片型号 |
编译 |
|
编译当前选择的芯片 |
配置 |
|
配置当前选择的芯片 |
清理编译产物 |
|
清理当前芯片的编译产物 |
清理芯片 |
|
清理当前芯片的所有产物 |
创建外部工程 |
|
在SDK之外创建一个新的工程 |
J-Link 调试工具 |
|
通过 J-Link 调试当前芯片 |
小技巧
在 Linux 系统中,支持按 TAB 键启动自动补全命令。此外, soc 命令支持自动补全芯片型号。
帮助指令
如果您是第一次使用 ameba.py 脚本,可以通过以下命令了解此脚本的用法,所有支持的命令将会被列出:
ameba.py help
$ ameba.py help
Ameba CLI Development Tool
Usage: ameba.py [COMMAND] [ARGS]
Available commands:
build : Build on the current or given SoC. e.g. ameba.py build [soc_name] [args]
clean : Clean build products of the given or current SoC. e.g. ameba.py clean [soc_name]
cleansoc : Clean all products of the given or current SoC. e.g. ameba.py cleansoc [soc_name]
flash : Firmware flashing.
help : Display this help information.
jlink : J-Link tool.
list : List all available SoC names.
menuconfig : Run menuconfig tool for the current or given SoC. e.g. ameba.py menuconfig [soc_name] [args]
monitor : Serial monitor.
new-project : Create a new empty project in the given path. e.g. ameba.py new-project path/to/your/project [-a app_name]
show : Show the current selected SoC name.
soc : Select an SoC to build. If no SoC name given, enter the interactive selection.
Run 'ameba.py <COMMAND> -h' for more information of command build/menuconfig/flash/monitor/jlink.
查询可用芯片
ameba.py 脚本被调用时,会自动检测当前 SDK 中的全部可用芯片型号。
使用 list 命令可以罗列出所有可用芯片型号:
ameba.py list
选择芯片
使用 soc 命令选择当前要编译的芯片型号,可以加上芯片型号名称,例如:
ameba.py soc RTL8721Dx
选择的 SOC 信息会被保存在当前目录下的 soc_info.json 文件中,后续的编译、配置等操作均基于当前选择的芯片型号进行。一次只能有一个芯片型号被选择。
要更换芯片型号,可以再次使用 ameba.py soc [RTLxxx] 命令选择新的芯片型号。
小技巧
如果不指定芯片型号,
soc命令会进入交互式选择模式,用户可以从列表中选择所需的芯片型号。要查看当前选择的芯片型号,可以使用
ameba.py show命令。
显示当前芯片
使用 show 命令查看当前的芯片型号:
ameba.py show
这个命令会查询 soc_info.json 文件,从中读取当前选择的芯片型号。
编译
使用 build 命令编译当前芯片:
ameba.py build [args]
其中, [args] 部分可选,表示传递给底层 tools/scripts/build.py 脚本的参数,支持的参数请参考 编译指令 一节,也可通过 ameba.py build -h 命令查看。
例如,要进行纯净编译,可以使用以下命令:
ameba.py build -p
编译产物位于 build_RTLxxx 目录下,其中 RTLxxx 为编译的芯片型号。其中, build_RTLxxx/build 目录下存放编译生成的中间文件,最终固件(image 文件)位于 build_RTLxxx 目录下。
小技巧
若当前未选择芯片型号,
ameba.py build命令会提示用户进行交互式选择,然后开始编译。若要编译特定芯片型号,可以在
build命令后直接指定芯片型号,例如ameba.py build RTL8721Dx。通过这种方式选择的芯片会被更新到soc_info.json文件中。
配置
使用 menuconfig 命令对当前芯片进行配置:
ameba.py menuconfig [args]
其中, [args] 部分可选,表示传递给底层 tools/scripts/menuconfig.py 脚本的参数,支持的参数可以参考 配置工程(menuconfig) 一节,或者通过 ameba.py menuconfig -h 命令查看。
配置产物位于 build_RTLxxx/menuconfig 目录下,其中 RTLxxx 为配置的芯片型号。
小技巧
若当前未选择芯片型号,
ameba.py menuconfig命令会提示用户进行交互式选择,然后进入配置界面。若要配置特定芯片型号,可以在
menuconfig命令后直接指定芯片型号,例如ameba.py menuconfig RTL8721Dx。通过这种方式选择的芯片会被更新到soc_info.json文件中。
调试
使用 jlink 命令对当前芯片进行调试:
ameba.py jlink [args]
其中, [args] 部分可选,表示传递给底层 tools/scripts/jlink_script/jlink.py 脚本的参数,支持的参数可以通过 ameba.py jlink -h 命令查看。
该指令将根据当前芯片的架构自动生成 J-Link 脚本,位于 build_RTLxxx/jlink_script 目录下,其中 RTLxxx 为配置的芯片型号。生成脚本后,会自动调用相应的 J-Link 程序进行连接。
清理编译产物
使用 clean 命令清理当前芯片的编译产物:
ameba.py clean
build_RTLxxx/build 文件夹和固件( build_RTLxxx/*.bin )将被删除,但 build_RTLxxx/menuconfig 目录和 soc_info.json 文件会被保留。
可以指定芯片型号,例如, ameba.py clean RTL8721Dx 将会清理 RTL8721Dx 编译产物。
清理芯片
使用 cleansoc 命令清理当前芯片的所有产物:
ameba.py cleansoc
将会清理编译产物和配置产物, build_RTLxxx 文件夹以及 soc_info.json 文件都被删除。下次编译时需要重新选择芯片型号。
可以指定芯片型号,例如, ameba.py cleansoc RTL8721Dx 将会清理 RTL8721Dx 的所有产物。
新建外部工程
使用 new-project 命令在 SDK 之外创建一个新的外部工程:
ameba.py new-project path/to/your/project [-a app_name]
其中, path/to/your/project 为新工程的路径,必须要在 SDK 外部,可以是相对路径或绝对路径; -a app_name 可选,表示要在新工程中包含的应用示例名称,若不加该参数,将会创建一个空的应用示例。
例如,要创建一个名为 my_project 的新工程,并包含 http_client 示例,可以在 SDK 根目录执行以下命令:
ameba.py new-project ../my_project -a http_client
该命令将在 SDK 根目录的上一级目录创建 my_project 文件夹,并将 http_client 示例代码复制到该文件夹中。
创建完成后,进入新工程目录,可直接使用 ameba.py 进行开发。通过 ameba.py soc 选择芯片型号,然后通过 ameba.py menuconfig 和 ameba.py build 进行配置和编译。
如需在新终端中直接打开该外部工程目录,需先执行以下命令以配置开发环境:
source env.sh
然后即可通过 ameba.py 进行开发。

